Autonomous Inflatable Canoe

With the summer months nearly upon us, many are dreaming of warm afternoons spent floating on a quiet lake. Unless you’re [Kolins] anyway. Apparently his idea of a good time is controlling a full-sized inflatable canoe not from onboard with a pair of oars, but from the shore with a RC transmitter.
Of course, as the video after the break shows, just because the canoe is powered by a remotely operated electric trolling motor doesn’t mean it can’t still carry human occupants. In fact, with the addition of a Matek F405-Wing flight controller running the rover variant of ArduPilot, the boat can even take you on a little tour of the lake while you kick back and relax.
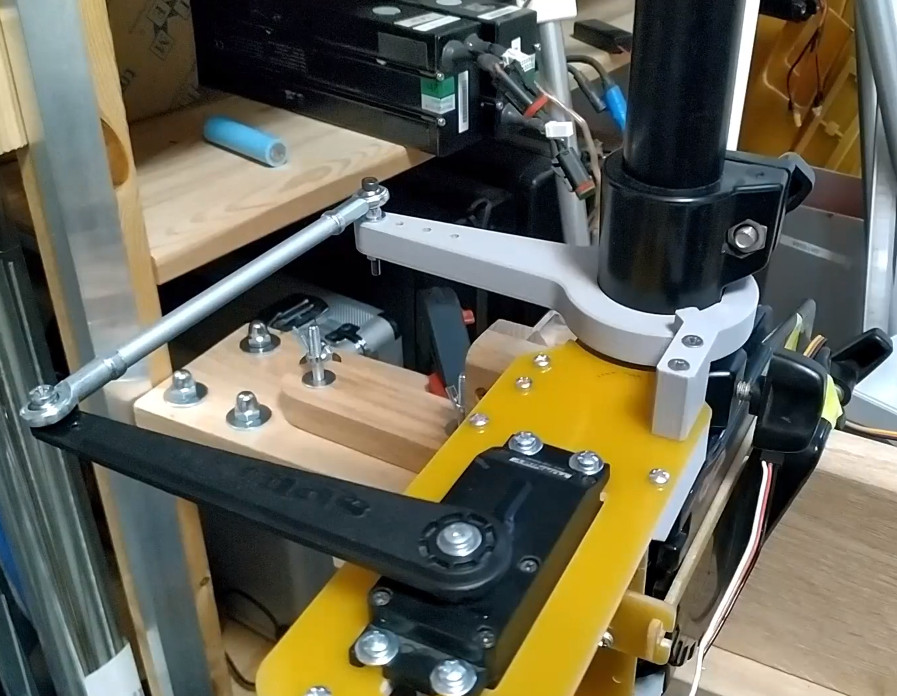
We like that this project took the path of least resistance wherever possible. Rather than trying to spin up his own custom propulsion unit, and inevitably dealing with the challenge of waterproofing it, [Kolins] built his system around a commercial trolling motor. A clever servo mechanism physically turns the motor in much the same way a human operator would, while the speed is controlled with a suitably beefy ESC from Traxxas placed between the motor and its lead-acid battery.
It doesn’t look like there’s been any permanent mechanical or electrical changes made to the motor, which makes the whole thing a lot easier to replicate. We’ve talked in the past about the relative rarity of low-cost robotic watercraft, so a “bolt-on” propulsion module like this that can turn a cheap inflatable boat into an autonomous platform for research and experimentation is very interesting.
Thanks to [Neolker] for the tip.
from Blog – Hackaday https://ift.tt/dgNzAtU



Comments
Post a Comment