Ball CVT Drives Robot From A Constant Speed Motor
[James Bruton] is experimenting is a series of interesting mechanical mechanisms, the latest being a CVT transmission system which uses a tilting sphere to get a variable speed output from a constant speed input. Video after the break.
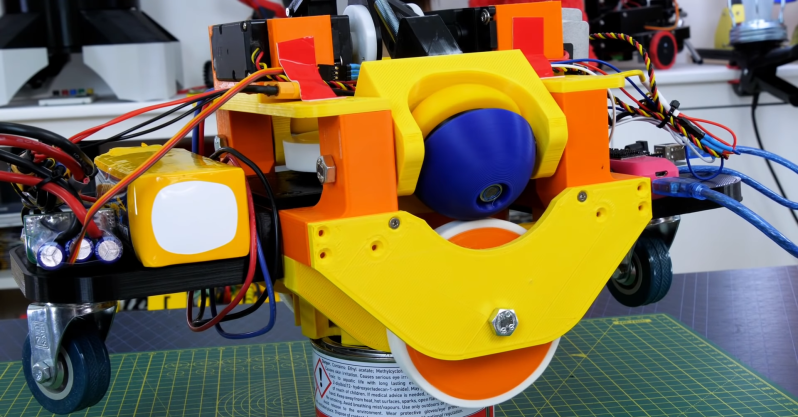
In [James]’ proof of concept RC vehicle, a single powered disc is mounted on top, at 90 degree to the wheels. A rotating sphere makes contact with both the driven disc and the wheel. When the rotation axis of the sphere is at 45° between the disc and the wheel, it provides a one 1:1 transmission ratio. As the axis is tilted, the contact points on the sphere shift, changing the relative circumference at the contact points, and therefore changing the transmission ratio. It can also reverse by tilting the sphere in the opposite direction, and disconnected from the output wheel by aligning it with the hole in the bottom of the sphere. [James]’ simple two-wheel RC car concept quite well, driving around his kitchen with the transmission spheres being tilted by servos.
Thanks to the response time, CVT gearboxes are generally not needed for electric motors, but on internal combustion engines that which run best within a certain RPM range they can be very useful. One possible weak point of a design like this is it’s dependence on friction to transfer torque, which makes it vulnerable to wear and slipping.
This build is a spin-off of his spherical omni-wheels and the robot chassis he developed around them. For another interesting robot mechanism, check out is gyroscope balancing system.
Thanks for the tips [BaldPower] and [Mel]!
from Blog – Hackaday https://ift.tt/3h3eMVj



Comments
Post a Comment